Het doel van deze prototype was om een simpele AI brain te maken met verschillende behaviours.
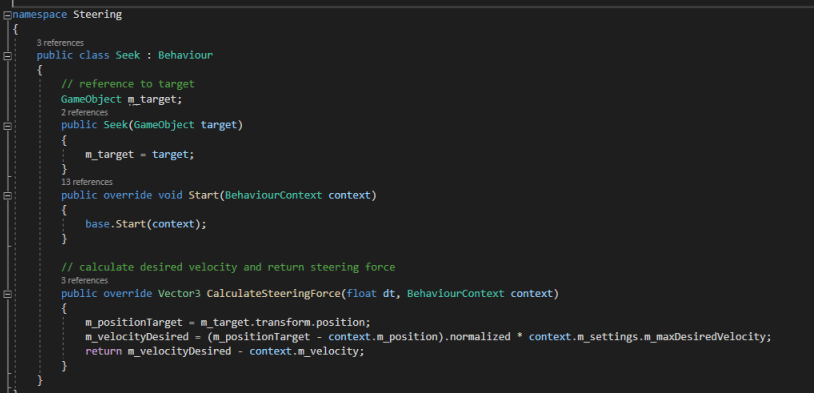
Seek: het object zoekt een andere object met de tag van target en gaat ernaartoe.
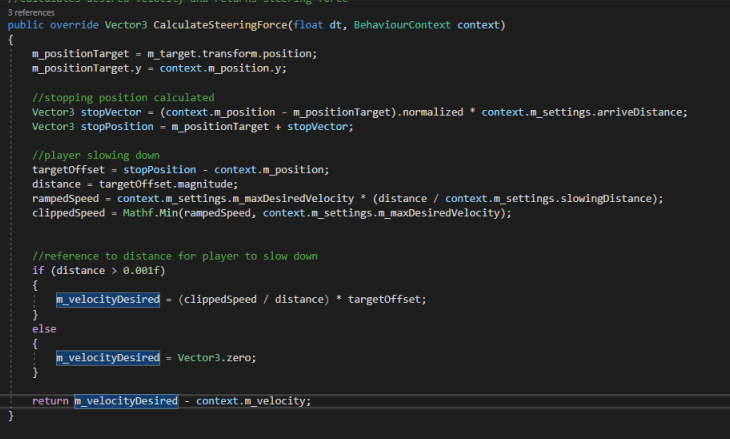
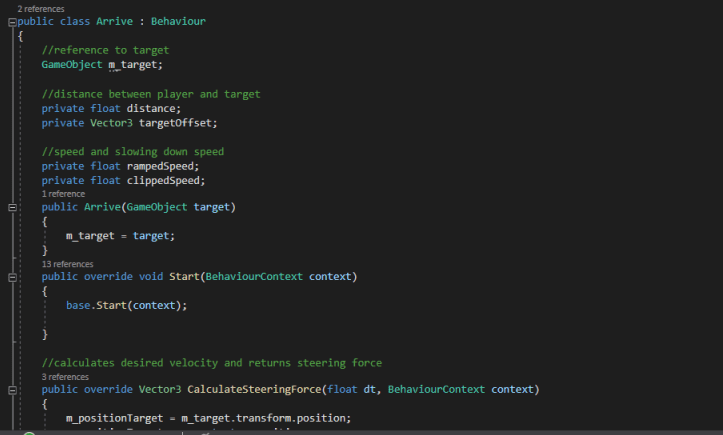
Arrive: het object doet het zelfde als seek maar remt beter af.
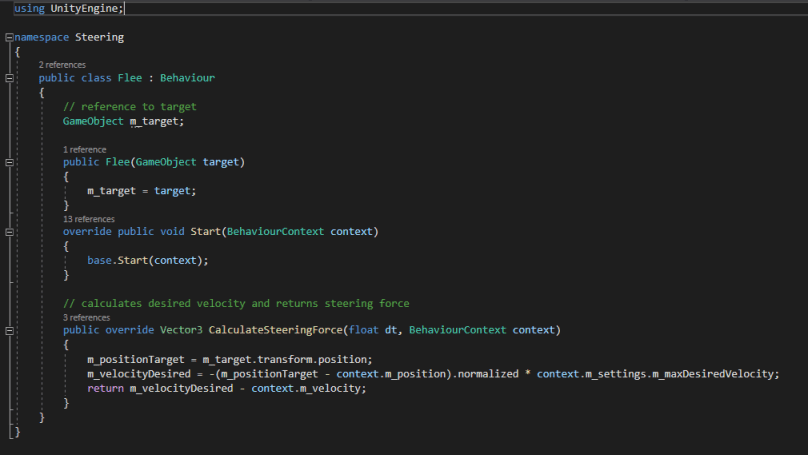
Flee: het object doet het tegenovergestelde van seek.
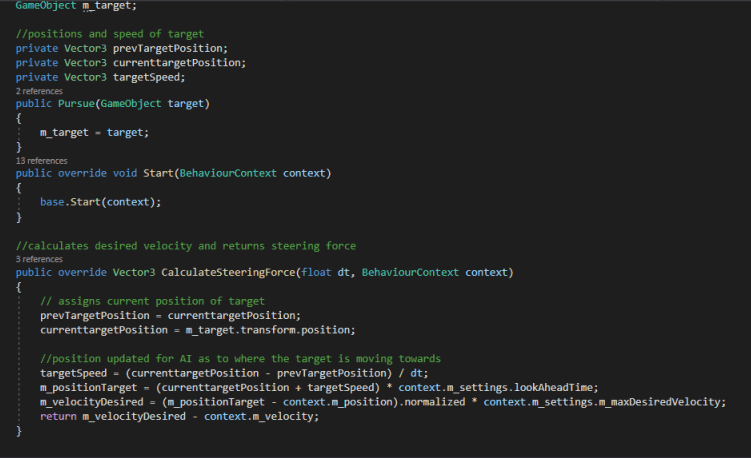
Pursue: het object achtervolgt een bewegend object met de snelst bewegende route mogelijk.
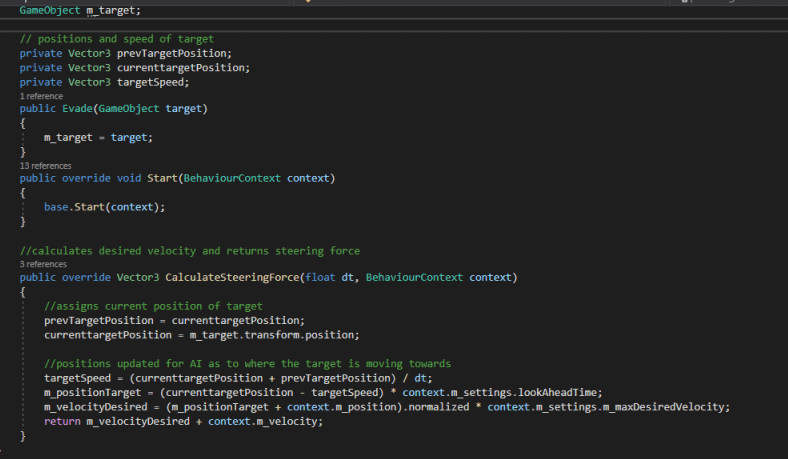
Evade: het object doet het tegenovergestelde van pursue.
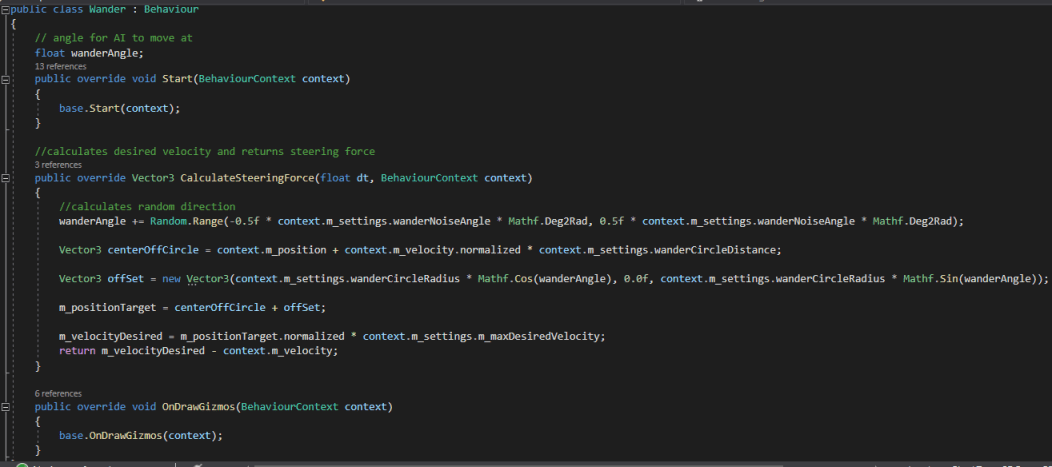
Wander: het object krijgt een random richting van graden toegewezen en gaat in een rechte lijn die kant op.
Follow path: het object krijgt waypoints toegewezen en gaat in een looping al deze waypoints na
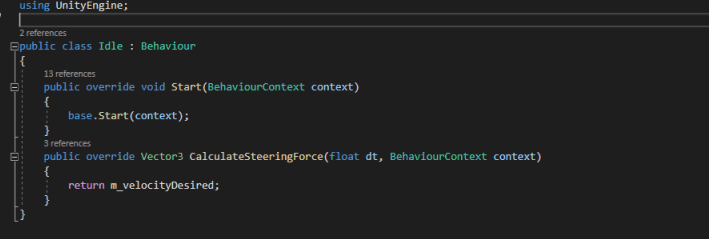
Idle: de naam zegt het al, het object gaat niet bewegen.